 WENZHOU WEITUO VALVE CO., LTD.
WENZHOU WEITUO VALVE CO., LTD.
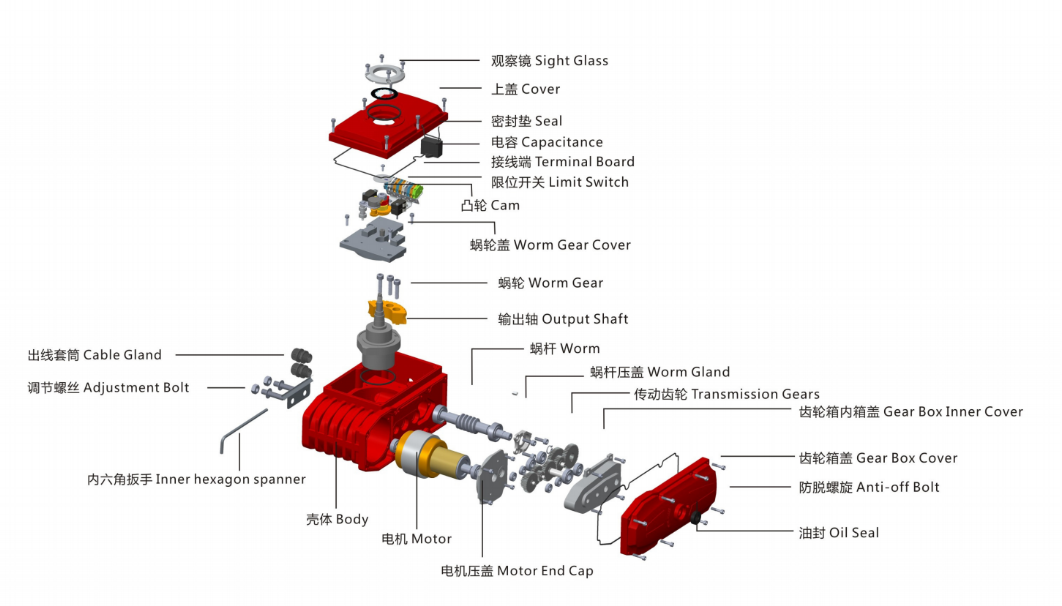
In industrial production, electric control valves are the most widely used. The electric regulating valve is composed of two parts: the actuator and the regulating mechanism (valve). The valve part has been introduced before, therefore, only the electric actuator is introduced in the electric control valve.
Advantages of electric actuators: electric actuators are easy to use, sensitive, and fast in signal transmission. They are suitable for long-distance signal transmission and are convenient for use with electronic computers.
Disadvantages of electric actuators: electric actuators are generally not suitable for fire and explosion-proof occasions, and the structure is complicated and the price is expensive.
Requirements for electric actuators
(1) For the actuator whose output is transfer, there must be enough torque, and for the actuator whose output is linear displacement, there must be enough force to overcome the resistance of the load. Especially for high-temperature and high-pressure valves, the packing pressure is relatively tight. After being closed for a long time, it often takes more force than normal when opened. As for the action speed, it is not necessarily very high, because the flow adjustment and control do not need to be too fast. . In order to increase the output torque or force, the output shaft of the motor has a reducer. If the motor itself is low-speed, the reducer can be simpler.
(2) The transmission system of the reducer or motor should have self-locking characteristics. When the motor is not rotating, the unbalanced force of the load (such as the weight of the gate valve) cannot cause the rotation angle or displacement to change. Therefore, a worm gear mechanism or an electromagnetic brake is often used. With this measure, in the event of an unexpected power failure, the valve position can be maintained at the position before the power failure.
(3) In the event of a power failure or a failure of the regulator, manual operation on the actuator should be possible to take emergency measures. For this, a clutch and a handwheel are necessary.
(4) When the actuator is manually operated, in order to provide the regulator with an automatic tracking basis (tracking is the need for disturbance-free switching), there should be a valve position tracking signal on the actuator. This is not only the need for position feedback of the actuator itself, but also the need for valve position indication.
(5) In order to protect the valve and transmission mechanism from damage due to excessive operating force, there should be a limit device and a device that limits force or torque on the actuator.